The geographical area determines the type of connection to the grid in its form, frequency and voltage. This causes serious difficulties when travelling, as it became evident in the Patty’s honeymoon video in The Simpsons.

But, even with unified power grid plugs, various daily use devices such as laptops or mobile phones have a variety of chargers and connectors. When thinking about the purchase of an electric vehicle, its compatibility with public charging facilities or future charging technologies can be a serious concern. In this sense, work is being done toward standard and unified systems. Although this goal has not been completely achieved, some options have been introduced and the most widespread standard will probably arise among them.

In addition, electric vehicle charging involves a high energy consumption.To get an idea, a slow charge (which takes less power) usually needs about 16 amps at single phase 220 V outlet in Europe. This means a maximum consumption of about 3.5 kW. In American power system that power is halved for a 110 V outlet, but the charge time doubles. The most powerful devices we use every day, such as a hair dryer, a heater, an electric water heater, an oven... usually need a power figure below 3.5 kW. Even the basic power limit that can be hired for a home in Spain is less than this value. If you want to charge the car faster, the power should increase and a three-phase connection becomes necessary. So it’s not only about standardization, because safety is also required in the operation due to the high power systems involved.

When considering the installation of charging points for electric vehicles, choices have to be made between several options that depend on conditions such as the available electrical infrastructure, the location, the intended use...
There are 2 main technologies: the conductive and inductive charging.
- Main advantage of inductive systems is that no electrical contacts are needed. Different proposals have been introduced and some of them carry out the installation of the system under the garage floor to charge a vehicle parked over it. On the other hand, their performance is low and its use is less widespread.

- The conductive charge is based on electrical contacts, as in any plug. It’s performance is high and, nowadays, it’s a widespread technology. Its main features are described below.
The most widespread standard that regulates the details related to the conductive charging process is known as IEC 62196. It defines the technical features, including communication systems between the vehicle and the station, but it doesn’t include standards for connectors. It’s defined by the International Electrotechnical Commission (IEC). Often, each plug design includes its own protocol for communication and charge, but all can be related to the definitions made by IEC 62196. In it, 4 categories are defined to characterize the charging mode:
-Mode 1, slow charge using a household socket-outlet:
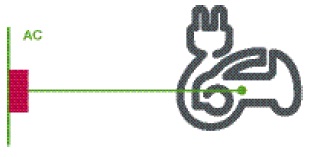
This mode defines the charge from the AC power grid through household outlets not exceeding 250 volts for single fase AC or 480 volt for three phase AC. Control contacts are not required and more restrictive local regulations should be fulfilled. In some cases, such as USA, this type of charge is prohibited because not all household outlets have the necessary protective earth.
-Mode 2, slow or fast charge using a household electrical outlet with a protective and control device embedded in the connection wire:
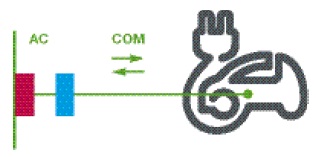
In this case the grid supplies also single phase AC to 250 volts and 32 amps and 480 volts and 32 amps for three-phase. Protective earth is needed and the control device located between the household outlet and the vehicle has a management contact that communicates with the car and regulates the charge based on several parameters.
-Mode 3, slow or fast charge through outlet with specific equipment and control and protection functions embedded:
This mode uses a dedicated equipment which is permanently connected to AC power. These devices need different signal and control contacts on both ends of the cord and the system avoids the voltage on the vehicle’s connector if it is not plugged. In addition, communication between vehicles and stations makes possible the integration into “smart grid” distribution systems.
-Mode 4, fast charge using an external charger:

In previous modes the electrical outlet was equipped with different degrees of complexity, but the charging process is always done using an in-vehicle system, which adjusts the electric power and converts electricity to get the DC current which is supplied to the batteries. In mode 4, these processes are carried out by the charging station, which provides DC current to the vehicle, achieving the fastest charges.
The management, safety and possibilities increase with mode number, but the device cost is more expensive.
Within these modes, different types of connectors are designed. They have high protection indexes that make possible its daily use. The most common designs are listed below:
•Type 1: SAE J1772 or Yazaki..
This connector is proposed by the Society of American Engineers, SAE and it’s the standard in USA. It encompasses not only physical but the device itself and the communication protocols used. This is the connector appearance:

It’s based on a 43 mm (1.7 inches) round shape and it’s composed by 5 pins: 2 for AC line (same size), one protective earth, one for proximity control (prevents the car from moving when connected) and one for control purposes. The control connector uses a square wave (+ -12 V) of 1 kHz frequency that controls the vehicle's presence, regulates the maximum permissible current intensity and the whole process. The position of these pins on the connector is shown in the following picture:

It is designed for several levels of AC power:
•Level 1: 120 volt single phase supply and up to 16 amps (up to 2 kW)
•Level 2: Split-phase 240 volts systems and up to 80 amperes (up to 19 kW).
This system can be used in mode 2 or mode 3.
Later, a different configuration with additional DC current and protective earth pins is introduced. It can provide 36 kW of power at 200-450 volts DC at the first level and up to 90 kW with 200 amps DC for level 2.
-Type 2: VDE-AR-E 2623-2-2 or Mennekes.
Mennekes is a German company which makes electrical components. It has proposed a standard protocol and vehicle charging connector, which has a good chance of being the standard in Europe.
The appearance of the connector is shown in the image below.

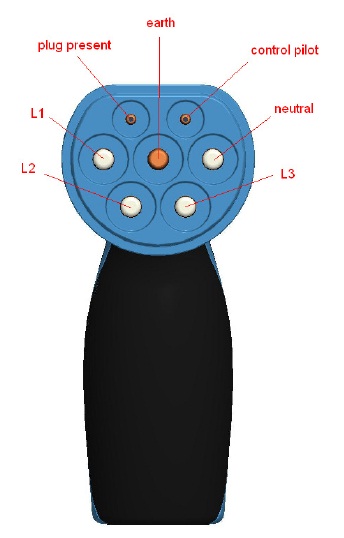
It consists of 7 contacts arranged in a round shape of 55 mm. (2.2 inches) with a flat area. The set of contacts includes 3-phase AC, one neutral,one protective earth and two signal pins. One is to handle the communication between the vehicle and the charging station and the other one detects the car presence. These pins are identified in the picture below:
This charging system is connected to the AC grid, either in Mode 2 or Mode 3, with the following characteristics:
- Single phase, 230 volts up to 16 amps (up to 3.7 kW).
- Three-phase, 380 volts up to 63 amps (up to 43.8 kW).
-Type 3: Scame or EV Plug Alliance.
This connector is created by the EV Plug Alliance, a group formed by Schneider, Legrand and Scame, and it’s also known as Scame connector. This is another strong bet to implement electromobility in the European market.

It can provide single-phase charge at 220 volts or three phase at 380 volts up to 22.2 kW (up to 32 amps at 400 volts three-phase).

It can include 5 or 7 contacts in the connector, consisting of the 3 phases, neutral, protective earth and 2 pins to communicate with the docking station. This connector is designed mainly for mode 3.
-Tipo 4: TEPCO - JARI - CHAdeMO
CHAdeMO is an association formed by Tepco, Nissan, Mitsubishi, Fuji Heavy Industries (maker of Subaru) and Toyota. The standard CHAdeMO allows fast charge with direct current, so, it moves the conversion and rectification of current outside the vehicle and provides DC power directly to batteries. This system achieves the fastest charging and it’s an international technology for this kind of process. The connector used is shown below and it’s also called Jari or TEPCO, as it has been established by the Tokyo Electric Power Company.
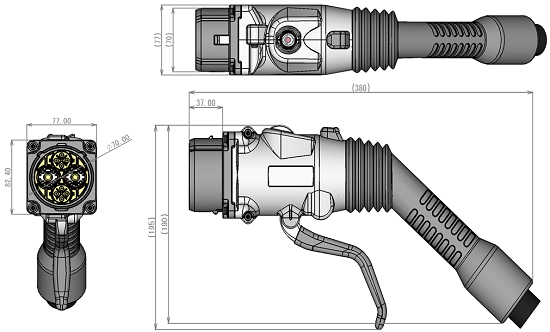
The connector has 10 contacts. The two with a larger diameter are the positive and negative poles that provide DC current and the other 8 are a combination of analog and digital communications for charging management and control. The most important physical connections in this system are shown in the image below:
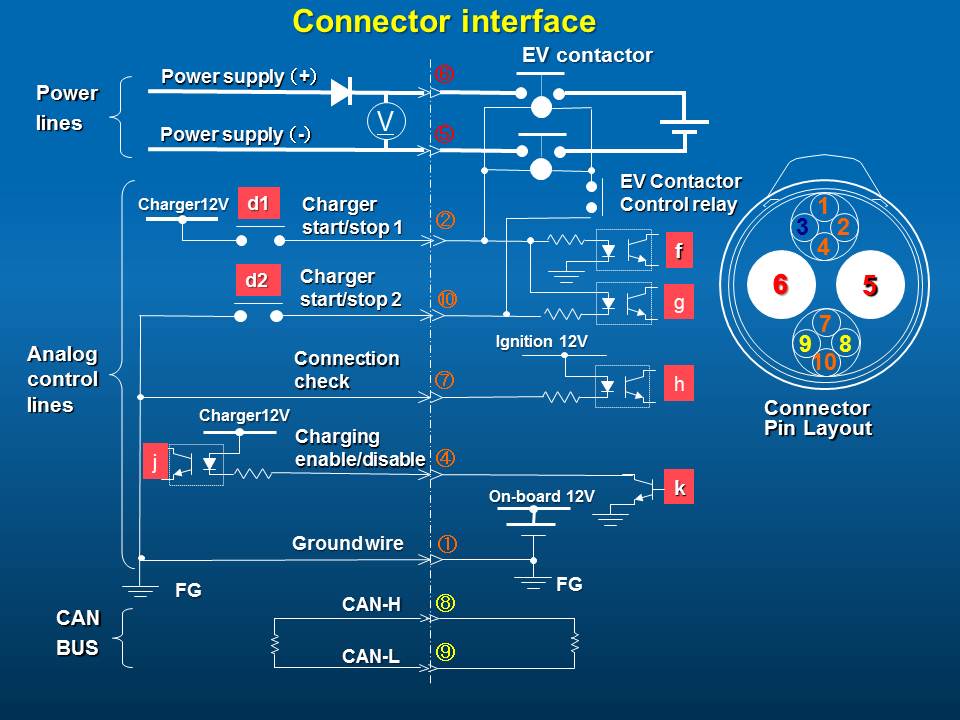

This system is a mode 4 and provides a maximum current of 100 amps at 500 volts DC, which means up to 50 kW. This high power requires the charging station to be connected to the high voltage grid, usually with a dedicated transformer.
These are the main systems that are now on the market. Probably, in the future, some of them will become standard and others will disappear, but now they are doomed to coexist. So, the manufacturers will have to monitor their evolution to avoid your car model to become the next HD-DVD.
- Sources:
Info about standard IEC 62196
Wikipedia
Conectors IEC 62196
Forococheselectricos.com
Mennekes
Información Mennekes
Scame
ecomove.es
Schneider-electric
Scame
Information about standard TEPCO - CHAdeMO
Wikipedia
International Energy Agency
Chademo
- Images:
Patty:
http://eyeonspringfield.tumblr.com
Cell phone chargers:
http://www.celulais.com/
Grames:
http://plusplusdance.tumblr.com/
Inductive charge:
http://gajitz.com/look-mom-no-cord-induction-charger-for-electric-cars/
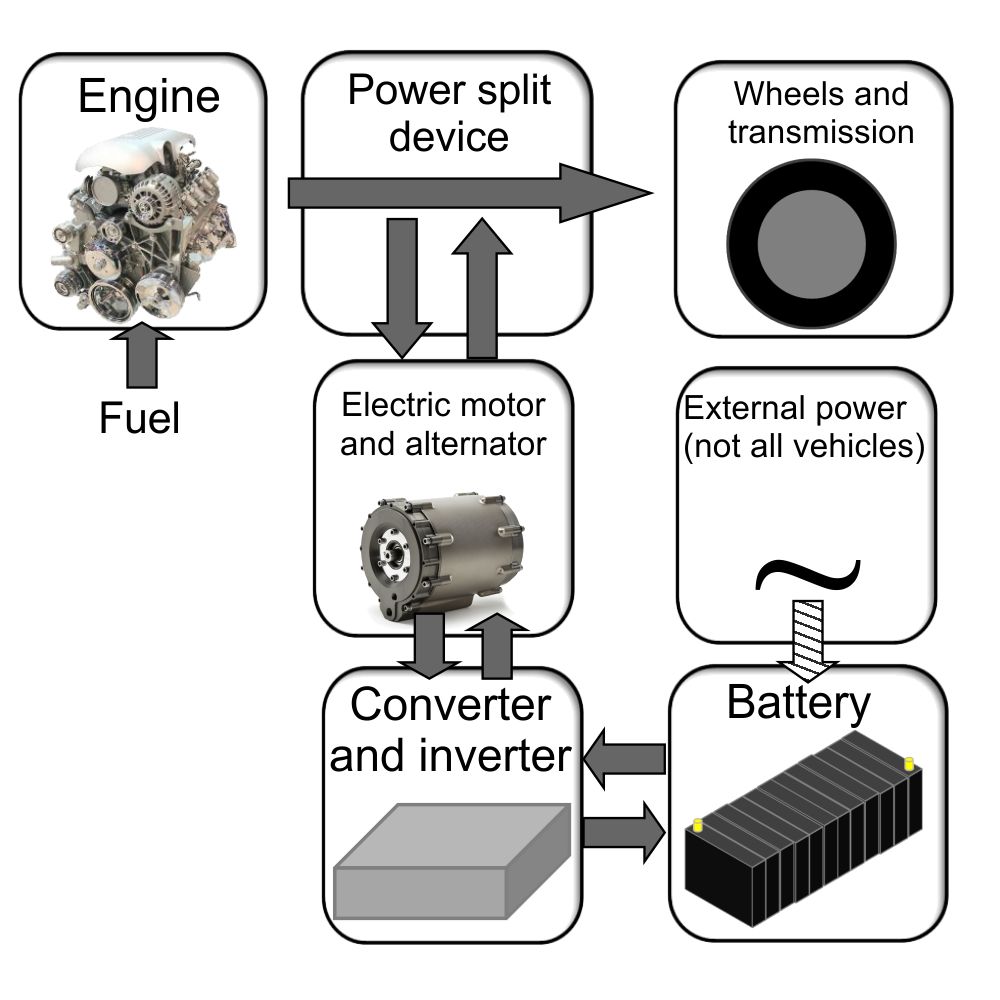
Charge modes
Schneider-electric
SAE J1772
http://carstations.com/types/j09
http://www.sae.org/mags/aei/enrg/7479
Mennekes
Bluemobility
http://elbil.pbworks.com/f/MENNEKES%2Band%2BEV.pdf
Scame:
Scame.com
Evplugalliance
CHAdeMO:
Thetruthaboutcars
http://www.uppladdning.nu/OutletsInfo.aspx
Chademo.com